什么时候需求引进一个高精度地图标注传感器?
发布时间: 10-31点击数:1987在“从驾驭辅助到自动驾驭,高精度地图与定位的开展道路”分论坛上,中海庭董事长罗跃军作了名为“备战自动驾驭,高精度地图面对的机遇与应战”的主题讲演。这也是本年9月底上汽宣告控股中海庭后,后者初次对外发声。以下内容由雷锋网编辑整理。
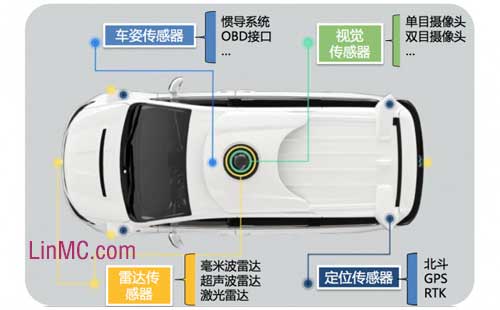
自动驾驭这个范畴,方针支撑和规范落地将推进自动驾驭完结规范化、自主化。AI技能的长足开展给自动驾驭的完结供给了条件,并深度应用于感知、建图、决议计划等环节,明显提高了轿车智能的水平。而定位、雷达、视觉等传感器协作交融,经过算法处理形成完结的轿车周边驾驭态势图,供给驾驭决议计划依据。
Waymo经过多个传感器冗余来保证安全问题。但即便这样的情况下,自动驾驭仍然寻觅许多不稳定要素,比如在传感器中,视觉和激光雷达的感知规模照旧有限,不可能感知无限远的间隔。在某些环境下(如雨雪雾),这些传感器地图标注也会失灵。
这就是自动驾驭鲁棒性短缺的问题:
在环境感知方面,由于多种传感器丈量的鸿沟,包括视觉、激光感知规模有限;传感器的环境感知约束,如激光雷达在尘土飞扬的路上失灵;摄像头在雨雪气候无法作业。
在车身定位方面,在高架桥、隧道等当地GPS信号失锁;惯导体系跟着时刻会产生误差累积;
在决议计划控制方面,道路宽度、曲率、斜度、限速等很少改变的先验经历缺失,实时核算效率和准确度受限;仅靠实时感知的传感器,自动驾驭无法进行远间隔规划。
这时候需求引进一个高精度地图传感器,在无死角、无限性、全天候、全天时情况下,仍然可以坚持正常作业。